ST Robotics has been making and selling low cost bench top robots for 3 decades. Along the way we have been involved in a wide range of applications and projects. One major application area is agriculture.
 Case Study - Asparagus Picking Agricobot
Case Study - Asparagus Picking Agricobot
David Sands | ST Robotics
As the world population increases so does its need for food. Over the past decades food production and farming has become more and more efficient, producing more food at lower cost and higher quality. Of course modern farmers are highly mechanized and the next step from mechanization is robotics.
What can robots give us:
- labor saving
- and/or higher rates of production
- higher quality.
ST Robotics has been making and selling low cost bench top robots for 3 decades. Along the way we have been involved in a wide range of applications and projects.
One major application area is agriculture. A startup company has already licensed our technology for picking strawberries.

Prototype aparagus picking robot in Japan.
Why pick aparagus as a crop for robotic harvesting?
-
picking asparagus spears is hard work and very bad for your back.
-
Judging which spears to pick is subjective.
-
The crop can be ready overnight and labor is rarely available at such short notice.
-
Robots can work in the dark.
Some robotic harvesters have already been developed but their approach has been from the perspective of agricultural machinery not robotics.
A large asparagus harvester.

Moreover they tend to cut the asparagus on the fly i.e. while moving. This results in some spears being missed or damaged.
Correctly asparagus should be cut just below soil level otherwise the exposed cut stalk is vulnerable to bacteria and weather. The big machines can not do that.
How the ST robot 'agricobot' works:
The robot runs alongside the asparagus bed. An operator sees what the robot sees and selects asparagus to be cut.
AI system learns the difference between a good and a bad spear, then later knows what spears to cut.
There are two robots on a chassis that runs alongside the asparagus bed. (note that a version is planned that spans 3 beds)
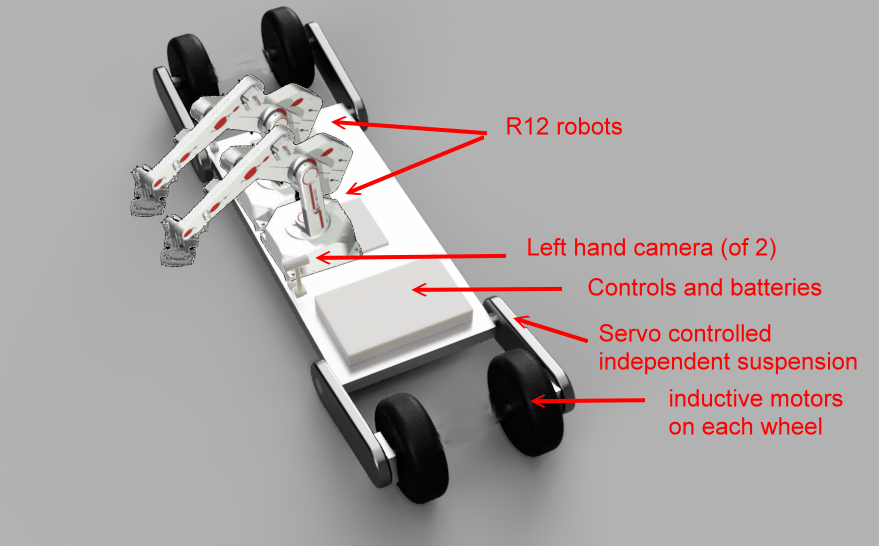
ST Agricobot chassis with 2 robot arms

Early feasibility tests.
The content & opinions in this article are the author’s and do not necessarily represent the views of AgriTechTomorrow
Comments (0)
This post does not have any comments. Be the first to leave a comment below.
Featured Product

